
HackerGrant
Hackergrant II Project Report -Pi Arcade Machine
The Project: Build a multiplayer Pi powered arcade machine that allows people to relieve stress by socialising and engrossing themselves in a digital universe temporarily. The
The Project: Build a multiplayer Pi powered arcade machine that allows people to relieve stress by socialising and engrossing themselves in a digital universe temporarily. The

By Skip Xtian 63% of employees eat two or less daily servings of fruits/vegetables, the lack of which contributes to gastrointestinal problems according to medical

This is my write-up of my Hackergrant II project that was completed last year as part of the Gold Coast TechSpace Hackergrant program (supported by

Our wonderful HackerGrant program now has a logo and a mascot. Designed by the awesome Julianne Powell – it’s a native Australian Numbat (with a

After the extremely successful Gold Coast Techspace Hackergrant program that was run in the early part of 2016, Ian Sampson and David Baker are running
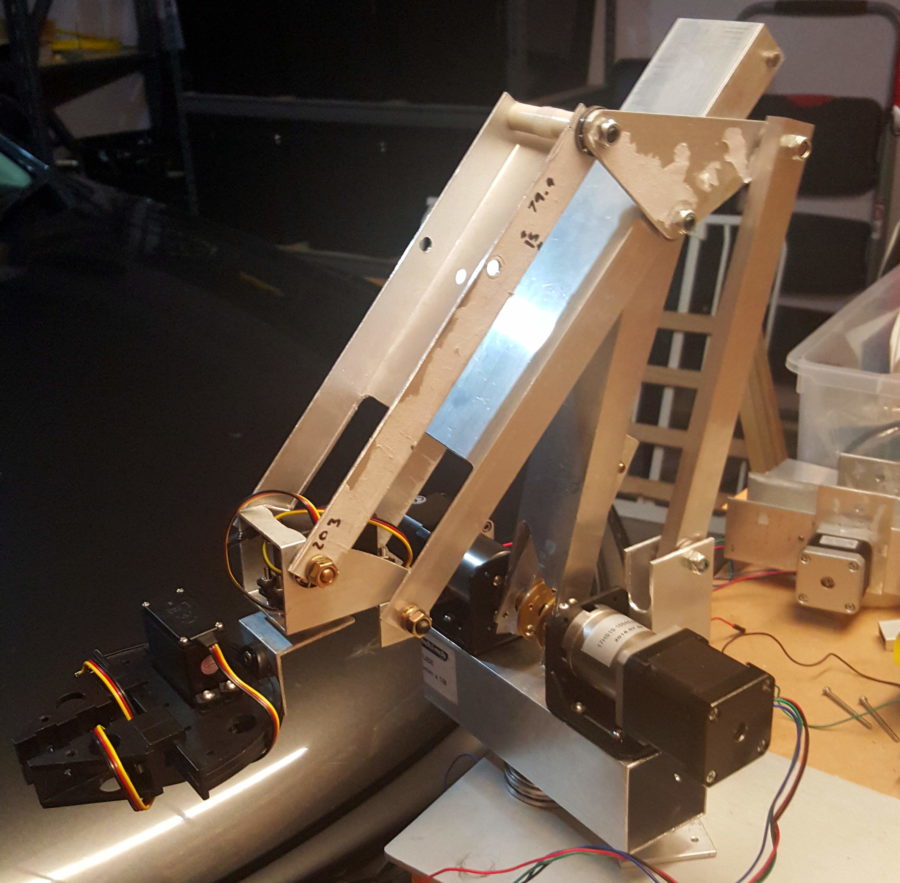
Overview The aim of project armed was to build an accurate miniature Robotic arm with machine vision based of the ABB industrial PalletPack robots, with
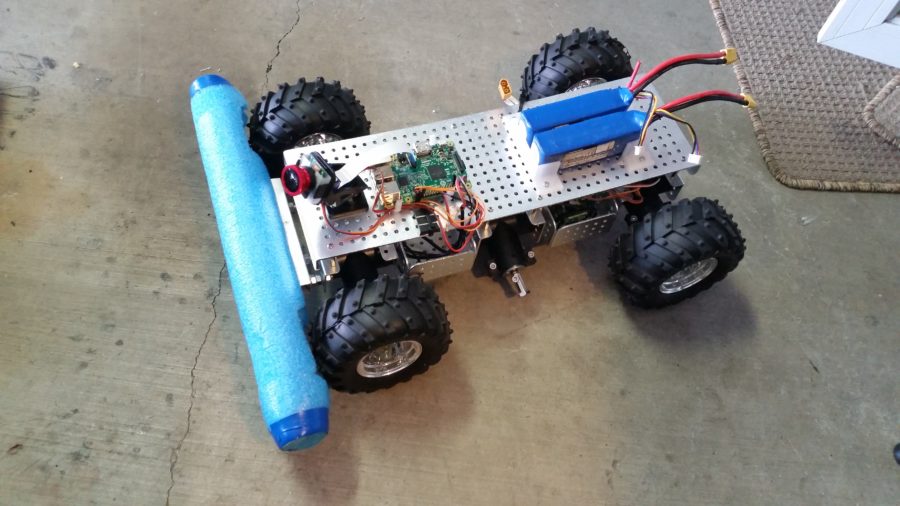
video1: FollowBot overview Overview: The aim of Project FollowBot was to build an autonomous robot that could follow a person around a house. We wanted

Overview Every year, around the world, vehicles of all shapes and sizes are travelling our motorways, tollways, interstates, or just local streets. Over these roadways,

A great evening at TechSpace! HackerGrant Demonstrations: We had four project demonstrations tonight: IVAN (In Vehicle Alert & Notification System ): Demonstration of an alarm that
Demo video of the home made Robot Arm!
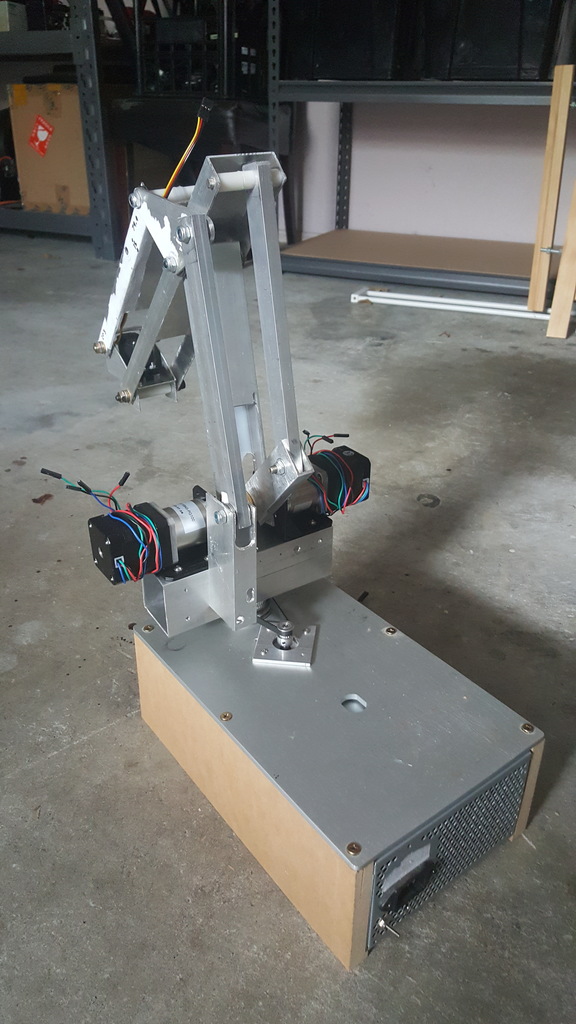
A nice base was created for Project Armed, providing power and a nice counter balance for the arm to operate.
FollowBot is now moving forward and backwards, tracking the object size and decided what to do. Good progress! And it now has a bumper bar to prevent
Added a bumper bar to the FollowBot while it is learning to drive. Also wide angle lens allows the Raspberry Pi to see better and track faster
Just connected a 2-axis servo mount for the camera. Now the eye can track objects independently of the moving robot base. Good fun!
The “FollowBot” project comes to life with working left/right object recognition. A combination of Python & C++ running on a Raspberry Pi3 allows this robot to